Wie bereits erwähnt, war das Ziel, mit möglichst wenig Änderungen auszukommen. Trotzdem geht es nicht ohne zusätzliche Teile.
Die 4 M-Motoren sowie die Zuleitungen habe ich direkt bei Lego.com bestellt. Alle anderen Teile gab es bei KieselBrick über Brickscout, kann ich nur empfehlen.
Mit einer genauen Liste kann ich leider nicht dienen, da ich die Teile nach Gefühl ausgesucht habe und auch viele Teile wieder verwenden konnte, die durch den Umbau erstmal übrig geblieben waren.
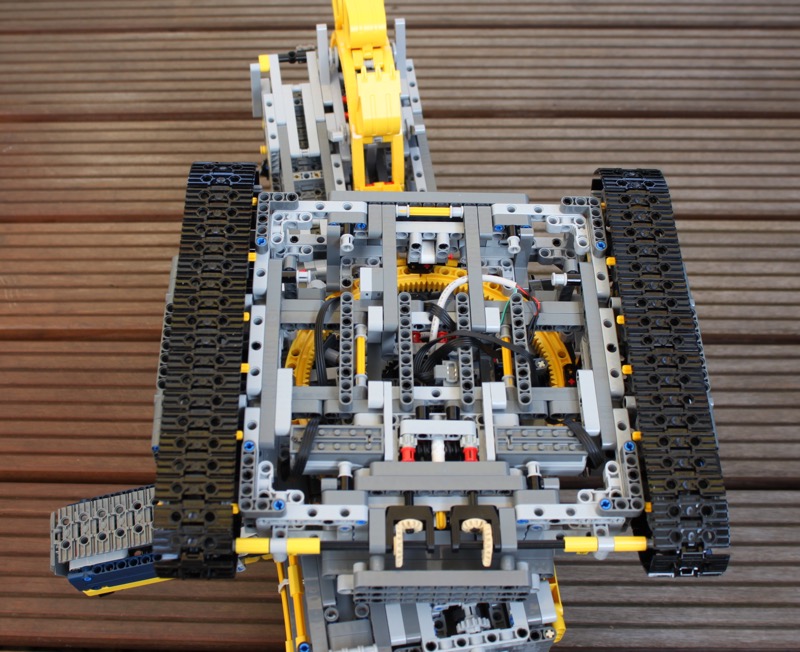
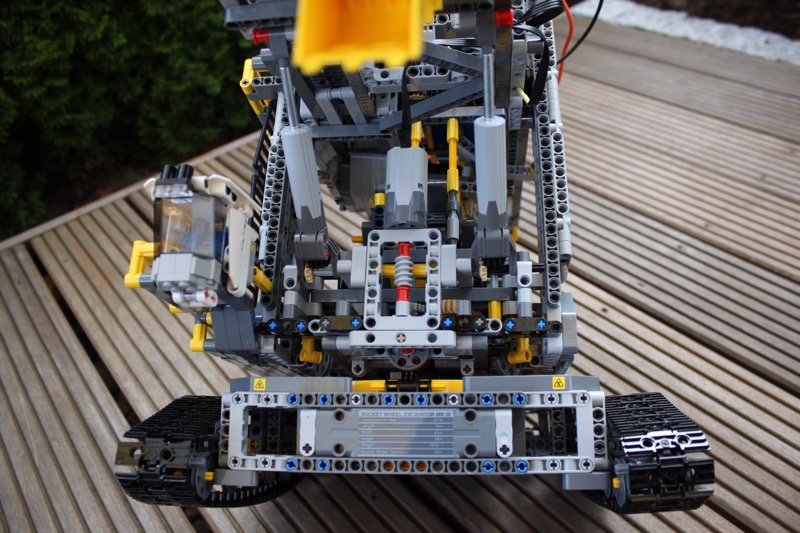
1: Das Fahrwerk
Das Original fährt, aber nur geradeaus, lenken ist nicht. Außerdem sitzt der Motor oben im Hauptgetriebe. Deshalb habe ich unten 2 M-Motoren eingebaut, die getrennt ansteuerbar sind. Die Inspiration habe ich mir hier geholt, letztendlich habe ich aber meine eigene Variante gebaut, die mir etwas einfacher scheint.


Die Zuleitung zu den Motoren habe ich über die Drehachse zentral geführt, so dass ein Drehen des Turms weiterhin möglich ist.
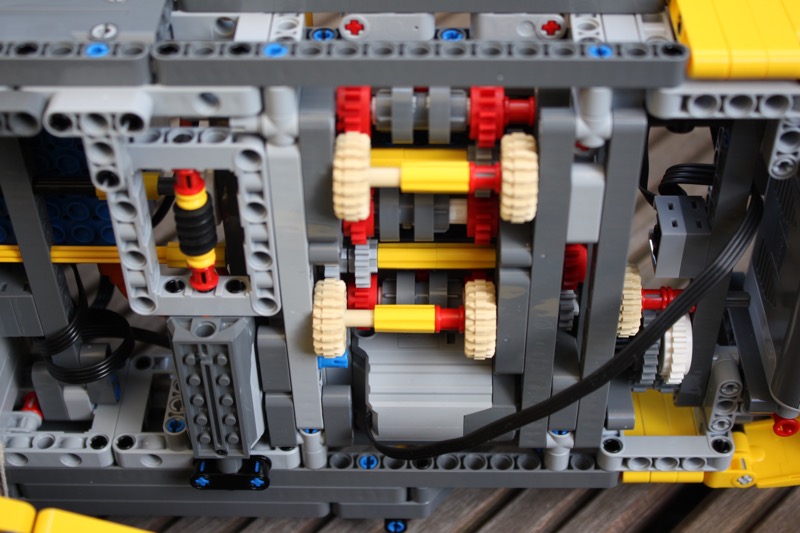
2: Der Turm
Auch das Drehen des Turms wird im Original über das Zentralgetriebe mit dem XL-Motor gelöst. Ich habe die Verbindung zwischen Getriebe und Gestänge getrennt and an diese Stelle einen M-Motor mit Schneckenrad gesetzt.
3: Schaufelrad
Das Heben und Senken des Schaufelrads ist im Original nur manuell möglich. Aber auch hier kann man sehr einfach einen M-Motor mit Schnecke einsetzen.
4: Rad und Förderband
Bleibt der Antrieb des Schaufelrades und der Förderbänder: Das bleibt einfach, wie es ist. Der XL-Motor macht das prima. Den letzten Freiheitsgrad, das Drehen des kleinen Förderbandes, habe ich auch unverändert gelassen.
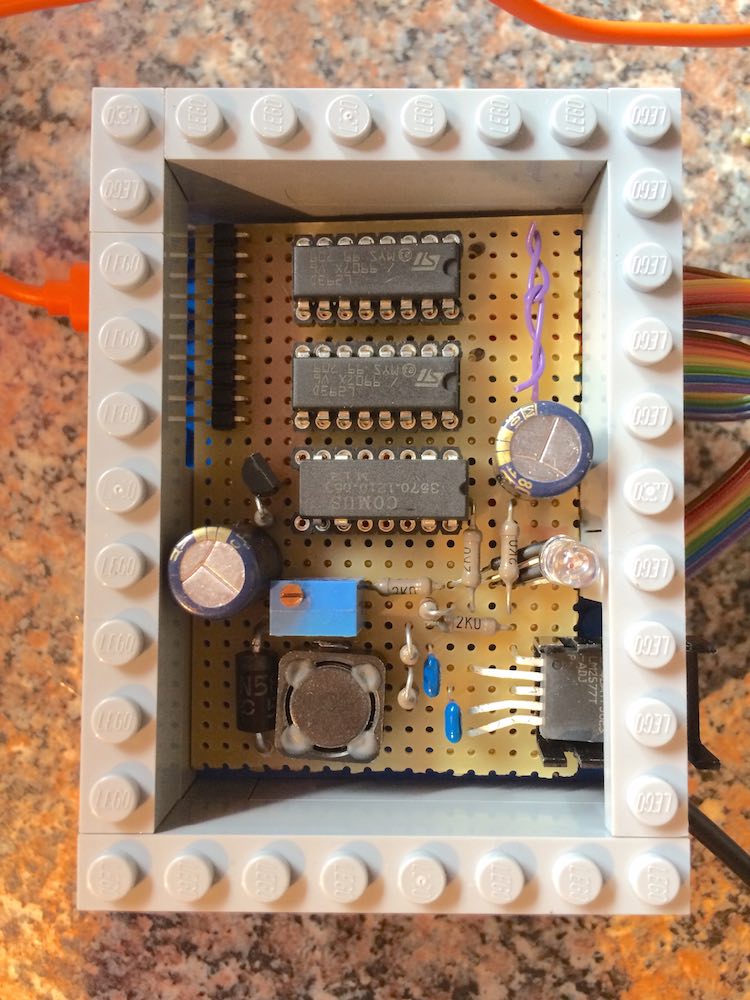
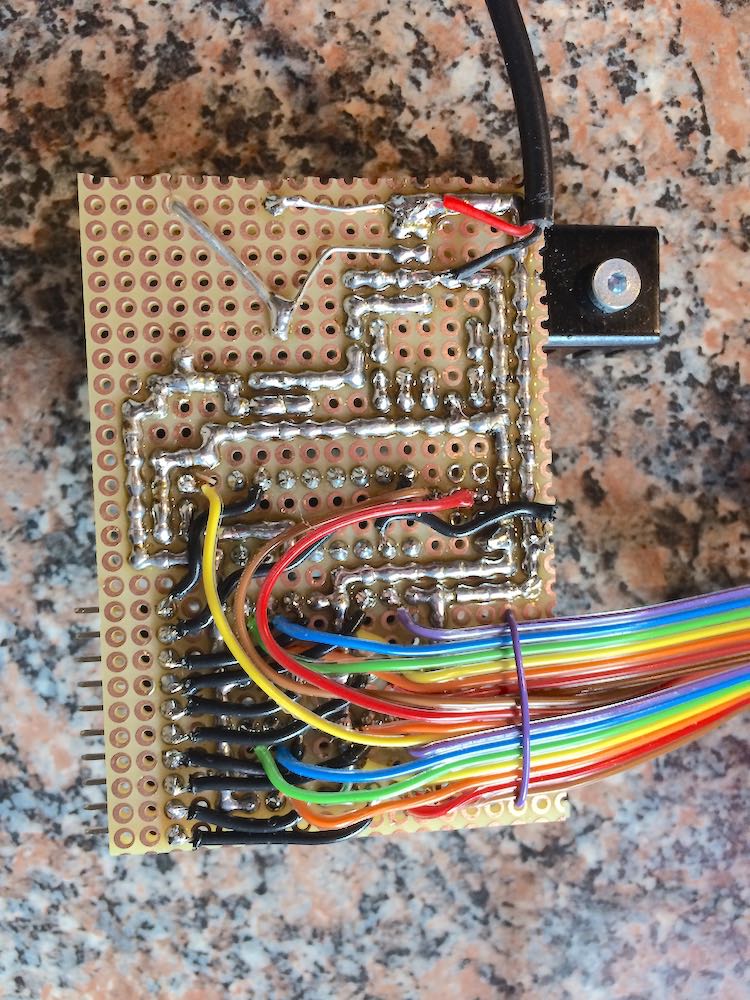
Teil 2: Anpassplatine

 Schaufelradbagger Typ SRs 1500
Schaufelradbagger Typ SRs 1500