Bevor ich zur Platine selbst komme, ein paar Worte zum Akku.
Als Akku kommt eine Powerbank zum Einsatz. am besten eine mit 2 USB-Anschlüssen, einen für den Raspberry Pi und einen für die Motoren. Der Formfaktor sollte so sein, dass er gut einbaubar ist. Ich hatte mich für einen flachen quaderförmigen Typ entschieden, der einen High-Power-Output hat. Das ist wichtig, da die Motoren durchaus einen relevanten Strom ziehen (Details kann man sich googeln). Leider reichte auch das nicht aus. Der Akku reagierte nämlich sehr empfindlich auf den Anlaufstrom der Motoren, d.h., die Überstromsicherung schaltete oft den Akku aus, was ziemlich lästig war. Zum Glück habe ich dann noch einen anderen Akku mit ähnlichen Abmessungen und etwas mehr nomineller Strombelastbarkeit gefunden. Der hier ist es, wie lange es den allerdings gibt, wer weiß …
Ich brauche:
- 4 x Motoransteuerung mit Drehrichtungswechsel für die 4 M-Motoren
- 1 x Motoransteuerung einfach für den XL-Motor
- Step-Up-Converter zur Bereitstellung der 9V aus 5V
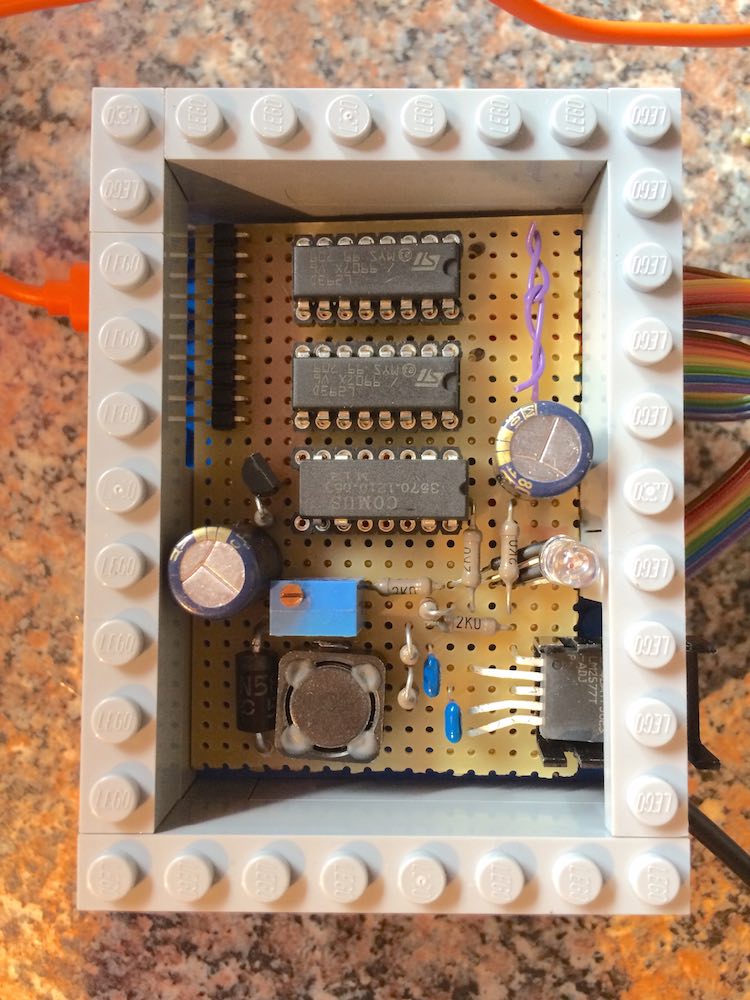
Für die Motoransteuerung der M-Motoren verwende ich den L293D, ein robuster bewährter DC-Motor-Treiber, die Version mit den integrierten Dioden.
Da der XL-Motor keine Drehrichtungsumkehr braucht, reicht hier ein Relais aus, ich habe ein DIL14-Reed-Relais (Typ 3570-1210-053 bei Conrad) mit 0,5A Schaltstrom genommen.
Der Step-Up-Converter ist ein LM2577-ADJ, robuste Technik, leicht überdimensioniert, da gibts keine Probleme.
Dazu noch eine RGB-Status-LED, fertig.
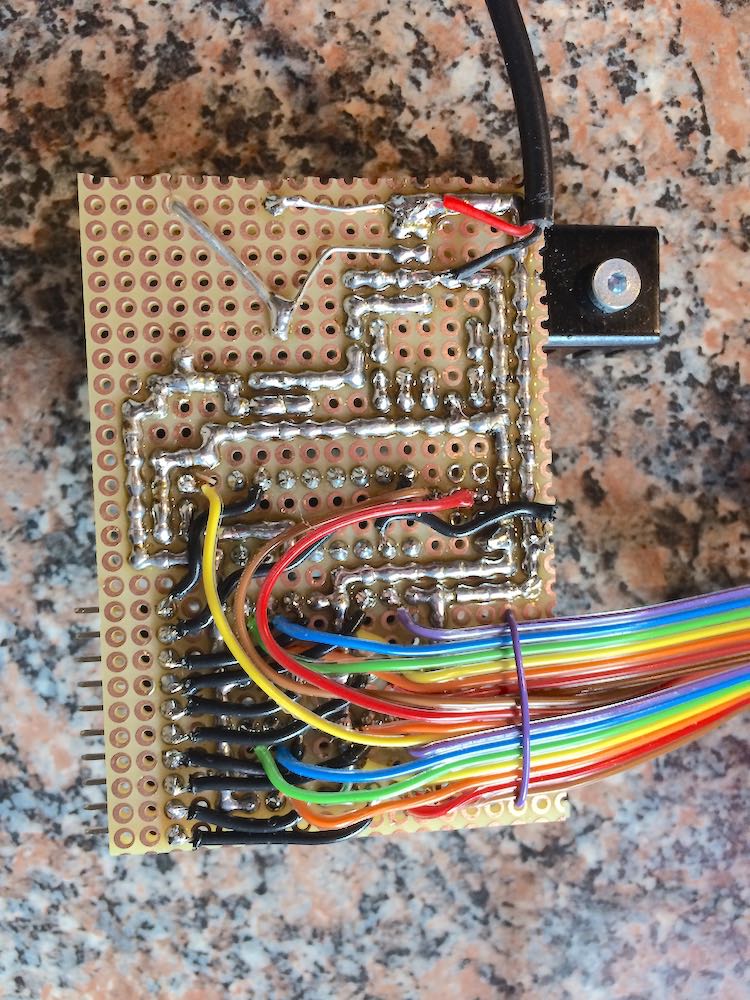
Als Gehäuse für den Raspberry Pi habe ich ein Lego-kompatibles Teil genommen. Die Platine soll genau drauf passen, damit sie mit Legoteilen eingebaut werden kann. Die folgenden Bilder zeigen, wie das aussieht.